LaTeX templates and examples — University
Seneste
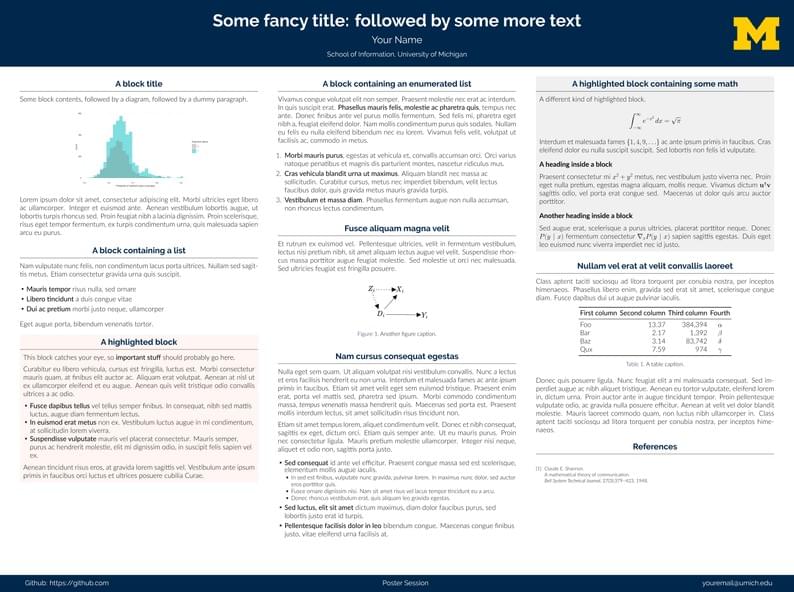
University of Michigan (UMich) unofficial poster template. Fork of another gemini poster template.
A minimalistic beamer template created for University of Warwick.
A Beamer Theme of UCAS for academic report, thesis and talk.
中央财经大学beamer模版,根据THU beamer theme 修改而成。

这是为南京林业大学学生设计的 LaTeX Beamer 主题,支持中文编译。此模板主要来自翁家翌 Trinkle23897 制作的 THU-Beamer-Theme。他的 GitHub 地址是 https://github.com/Trinkle23897/THU-Beamer-Theme. Happy LaTeXing !
此项目提供是用于论文汇报、毕业开题与答辩、组会报告等相关场景的Beamer模板,旨在帮助河北经贸大学大学师生高效地完成演示幻灯片的制作。
作者:付濛,来源于:https://github.com/fumeng6/CDUT-Master-Thesis-LaTeX-Template 成都理工大学的硕士学位论文的LaTeX模板,该模板为学硕模板,专硕需要参照格式文件修改部分内容。

此项目提供用于排版桂林电子科技大学用于毕业开题、答辩,组会报告等相关场景的Beamer模板,旨在帮助桂林电子科技大学师生高效地完成演示幻灯片的制作。
石河子大学(SHZU) Beamer-Theme
Relaterede tags
- Portuguese
- Purdue University
- Queen's University Belfast
- Handout
- Bosnian
- International Languages
- TikZ
- Math
- References
- Algorithm
- Biber
- BibLaTeX
- Tables
- Czech
- Quiz, Test, Exam
- Universiti Utara Malaysia
- Conference Paper
- Conference Presentation
- Harvard University
- Tutorial
- Physics
- Source Code Listing
- Swedish
- French
- Portuguese (Brazilian)
- Greek
- Getting Started
- Research Diary
- Cover Letter
- Essay
- Exam
- Title Page
- Spanish
- German
- Radboud University
- Technological Educational Institute of Peloponnese
- LuaLaTeX
- Université d'Avignon
- Universiti Malaysia Sarawak
- Universiti Malaysia Perlis
- Instituto de Matemática, Estatística e Ciência da Computação (IME-USP)
- Università di Bologna
- Information Technology University (ITU)
- Newsletters
- Posters
- CVs and résumés
- Formal letters
- Assignments
- IT University of Copenhagen
- Cambridge University
- Instituto Federal de Educação Ciência e Tecnologia (IFCE)
- Imperial College London
- Korean
- Norwegian
- Polish
- University of Bergen
- Matrices
- Boise State University
- Bristol University
- Finnish
- Tampere University of Technology (TUT)
- Universiti Sains Malaysia
- Multimedia University (MMU)
- Beamer
- SENAC
- Universiti Malaya
- XeLaTeX
- Arabic
- University of Sarajevo
- Universiti Kebangsaan Malaysia
- Bahasa Malaysia (Malay)
- Two-column
- University of Texas at Austin
- Umeå University
- Queen Mary University of London
- Romanian
- Universiti Putra Malaysia
- Zagazig University
- Monterrey Institute of Technology and Higher Education
- Universiti Teknologi Malaysia
- University of Helsinki
- University of Copenhagen
- Reykjavík University
- University of Reading
- Universidad Nacional Autónoma de México
- University of Cape Town
- Peking University
- Universidad de Costa Rica
- Books
- Presentations
- Reports
- Theses
- Japanese
- Tilburg University
- Universidade Tecnológica Federal do Paraná (UTFPR)
- Cologne University of Applied Sciences (Fachhochschule Köln)
- Kyushu University
- Universidade Federal de Alagoas
- Slovenian
- University of Manchester
- Federal University of Bahia
- University of Tokyo
- Universidade Federal do Rio Grande do Sul
- Technion - Israel Institute of Technology
- Vietnamese
- Özyeğin University
- Keio University
- Stanford University
- Chinese
- Thai
- Universidade de Lisboa
- Brown University
- Princeton University
- New York University (NYU)
- Pontifícia Universidade Católica de Minas Gerais (PUC)
- Evaluation
- Indian Institute of Technology Madras
- Sociedade Brasileira de Computação (SBC)
- Universidade de São Paulo
- Uppsala University
- Universidade Estadual Paulista (UNESP)
- Geology
- Wright State University
- Catalan
- Universidad Autónoma de Occidente
- Instituto de Ciências Matemáticas e de Computação (USP)
- Strathmore University
- Kiel University of Applied Sciences
- University of Porto
- Auburn University
- University of Burgundy
- University of Girona
- Heriot-Watt University
- University of Tennessee
- Malcolm X Shabazz High School
- Pocono Environmental Education Center
- Cardiff University
- Florida State University
- Hebrew
- Tel Aviv University
- Bloomsburg University of Pennsylvania
- McMaster University
- Åbo Akademi University
- Faculdades Integradas Espírito-Santenses (FAESA)
- University of California, San Diego
- Universidad Nacional de Asunción
- Universitat Rovira i Virgili
- Pontificia Universidad Católica de Chile
- Meeting Minutes
- Universidade Estadual de Ponta Grossa (UEPG)
- Russian
- Moscow Aviation Institute
- Universidade Nova de Lisboa (UNL)
- Research Proposal
- Universidad Tecnológica de Bolívar
- Lehigh University
- Technische Universität Berlin
- University of Utah
- Universidad de Santiago de Chile
- Lecture Notes
- Instituto de Astronomia, Geofísica e Ciências Atmosféricas (IAG/USP)
- Aalborg University
- Dutch
- University of Birmingham
- Universidade Federal de Mato Grosso do Sul
- Ben-Gurion University of the Negev
- University of Amsterdam
- Instituto Superior de Engenharia de Lisboa (ISEL)
- Université de Sherbrooke
- University of California, Berkeley
- Southeast University
- University of Louisiana at Lafayette
- Adelphi University
- KTH Royal Institute of Technology
- Dr BR Ambedkar National Institute of Technology Jalandhar
- Sapienza - Università di Roma
- Universidade de Caxias do Sul
- Universidade do Estado do Rio de Janeiro
- Icelandic
- Universidade Federal de Ouro Preto
- Astronomy & Astrophysics
- Masaryk University
- abnTeX
- Cornell University
- Lund University
- Aberystwyth University
- Universidad Autónoma de Yucatán
- California Institute of Technology (Caltech)
- University of York
- Université de Sfax
- Katholieke Universiteit Leuven (KU Leuven)
- Virginia Tech
- Universiti Pertahanan Nasional Malaysia
- Universidade Federal Rural de Pernambuco
- Charles University in Prague (Univerzita Karlova v Praze)
- Welsh
- HIET Hamdard University
- Humanities
- Universidad de Sevilla
- University of California, Davis
- Queensland University of Technology
- Bahasa Indonesia
- University of Strathclyde
- Eskişehir Osmangazi University
- Universidade Estadual de Feira de Santana
- Turkish
- Universidade Federal de Santa Catarina
- Tecnológico Nacional de México
- Politechnika Śląska (Silesian University of Technology)
- American Psychological Association
- Universidade Federal de Goiás
- Sungkyunkwan University
- University of Victoria
- University of Alabama
- Duke University
- University of Bath
- RMIT
- TU Delft
- University of Ljubljana
- German University in Cairo
- Memorial University
- Instituto Superior de Engenharia do Porto
- Technische Universität Wien
- Linköpings Universitet
- University of Banja Luka
- Bangladesh University of Engineering and Technolog
- Ukrainian
- University of the West of England Bristol
- Fachhochschule der Wirtschaft
- Johns Hopkins
- Universidade de Fortaleza
- Université Laval
- Universidade do Vale do Rio dos Sinos
- Kocaeli Üniversitesi
- Universidad Católica San Pablo
- Universidad Nacional de Colombia (UNAL)
- University of Twente
- National University of Singapore (NUS)
- Universidad de Chile
- Universidade de Brasília (UnB)
- Unidad de Formación Masiva
- National Institute of Technology
- Birla Institute of Technology and Science
- Universidad Tecnológica Nacional
- University of Ghent (Universiteit Gent)
- Universidade Federal do Rio de Janeiro
- Tsinghua University
- Swiss Federal Institute of Technology in Zurich (ETH Zürich)
- Modern Language Association (MLA)
- Universiti Tun Hussein Onn Malaysia (UTHM)
- Chicago
- University of Maryland Baltimore County
- Universidade Federal da Paraíba (UFPB)
- Politecnico di Milano
- Boğaziçi University
- Leiden University
- IES San Mateo
- Universidade Federal do Rio Grande do Norte (UFRN)
- Slovak
- INSA
- Eastern Mediterranean University (EMU)
- Universidad La Salle (Mexico)
- Universidade Federal de Santa Maria
- University of Pennsylvania
- Universidad Zaragoza
- Universidade Paulista
- Georgia State University (GSU)
- University of Toledo
- Universidade Federal do Piauí (UFPI)
- Universiti Malaysia Sabah
- Faculdade do Piauí (FAPI)
- Letter
- University of Texas San Antonio
- Queen's University, Canada
- Medical University of Vienna
- Centro Federal de Educação Tecnológica de Minas Gerais (CEFET-MG)
- Universidade Federal do Triângulo Mineiro
- University of Nottingham
- University of Arizona
- Hungarian
- TU Graz
- University of Pretoria
- Italian
- University of Iceland
- University of Illinois
- Nanyang Technological University
- Beijing University of Chemical Technology
- Guangdong University of Technology
- Universidade do Minho
- East China Normal University
- Ludwig Maximilian University of Munich
- University of Essex
- Fachhochschule St. Pölten (St. Pölten University of Applied Sciences)
- University of Florida
- University of Calgary
- Instituto Nacional de Pesquisas Espaciais
- University of Western Australia
- University of Shanghai for Science and Technology (USST)
- Turabian
- University of Seoul
- Pacific University
- Bangor University
- Universidade Federal de Uberlândia (UFU)
- Univerzita Palackého v Olomouci (Palacký University Olomouc)
- Örebro University
- Edge Hill University
- Indian Institute of Technology Kharagpur
- University College London
- Eindhoven University of Technology (TU/e)
- Escola Politécnica da USP
- Universidade Estadual de Campinas (UNICAMP)
- Instituto Politécnico de Bragança (IPB)
- Escuela Politécnica Nacional
- Universidade Federal de Lavras
- Florida Institute of Technology
- Salahaddin University-Erbil
- Universidad Central
- TU Dresden
- Massey University
- University of Queensland
- Xi'an Jiaotong University
- Université de Bretagne Occidentale (UBO)
- University of Electronic Science and Technology of China
- Czech Technical University in Prague
- Instituto Federal de Educação, Ciência e Tecnologia da Bahia
- Otto-von-Guericke-Universität Magdeburg
- Arizona State University (ASU)
- Universidad de Antioquia
- University of Udine
- Boston University
- Universidad Autónoma de Nuevo León
- Humboldt-Universität zu Berlin
- University of Virginia
- University of Michigan
- VIT University
- Universidade de Pernambuco (UPE)
- Sigtunaskolan Humanistiska Läroverket (SSHL)
- Universidade Federal de Juiz de Fora
- Universidade Federal de Minas Gerais (UFMG)
- University of Illinois at Chicago
- Stockholm University
- Farsi (Persian)
- Northwestern Polytechnical University, China (西北工业大学)
- Universidade Federal de Itajubá (Unifei)
- University of Science and Technology of China (USTC)
- Vrije Universiteit Brussel (VUB)
- Universidad Autónoma de San Luis Potosí (UASLP)
- Universidad Autónoma de Chile
- Universitat Pompeu Fabra
- Universidad Politécnica de Puebla
- TU Chemnitz
- University of Waterloo
- SGH Warsaw School of Economics
- Harbin Institute of Technology
- Università degli studi di Napoli Federico II
- Aalto University
- University of Warwick
- Universiti Tunku Abdul Rahman (UTAR)
- North Dakota State University (NDSU)
- Universidade Federal do Pará (UFPA)
- University Teknology PETRONAS (UTP)
- KEA Copenhagen School of Design and Technology
- University of Edinburgh
- Universität Ulm
- University of Leeds
- Universidade Federal de Alagoas (UFAL)
- Indiana University – Purdue University Fort Wayne
- North Carolina State University (NCSU)
- Universidad de Guadalajara
- Politecnico di Torino
- Ritsumeikan University
- University of Newcastle
- University of Malta
- Iran University of Science and Technology (IUST)
- University of New South Wales
- Universidad Católica de Colombia
- Michigan Technological University
- Oregon State University
- University of Passau
- Università di Pisa
- Universidade da Coruña (UDC)
- University of Athens
- Trinity College Dublin
- Universidade Estadual de Santa Cruz
- University of Vienna
- University College Dublin
- Universidade da Beira Interior (UBI)
- National University of Mongolia
- Universidad Andres Bello
- Universidad de Córdoba
- University of Bonn
- University of Pittsburgh
- Université de Lorraine
- Instituto Tecnológico Vale
- University of Central Florida
- Universidad Simón Bolívar
- Universidad de Oviedo
- Maastricht University
- Instituto Modal
- University of Southampton
- Texas A&M University
- University Jaume I
- UPV/EHU
- Aveiro University
- University of Jyväskylä
- Singapore University of Technology and Design (SUTD)
- Universidad de Cádiz
- FH Aachen
- Universidad Industrial de Santander (UIS)
- University of Innsbruck
- American University of Beirut
- Universitat de Lleida
- New Mexico State University (NMSU)
- Instituto Federal de São Paulo
- Universidad de Extremadura
- TU Darmstadt
- Universidad Católica Boliviana "San Pablo"
- Cairo University
- Universidad Cooperativa de Colombia
- Universidad de Ingeniería y Tecnología
- Universita' degli Studi di Messina
- Luleå University of Technology
- Università degli Studi di Trento
- Teaching Plan & Syllabus
- Universidad de Tarapaca
- Dublin Business School
- Gyeongsang National University
- University of East London
- Creighton University
- Instituto Tecnológico de Buenos Aires
- ShanghaiTech University
- Universidade Federal do Ceará
- Universidade Federal de Pernambuco (UFPE)
- Universidad del Valle de Guatemala
- Augsburg University
- Instituto Tecnológico de Tuxtla Gutiérrez
- Università degli Studi del Sannio
- Žilinská univerzita v Žiline
- University of Hawaii
- Mississippi State University
- Instituto Tecnológico Autónomo de México
- Ohio State University
- Universidad Católica de la Santísima Concepción
- Universidad Nacional de San Agustín
- Technical University of Munich
- Kyungpook National University
- Universidade Federal do ABC
- Universidade de Trás-os-Montes e Alto Douro
- University of New Haven
- Pontifícia Universidade Católica do Rio de Janeiro
- National Institute of Technology, Kurukshetra
- Khalifa University
- Hasso-Plattner Institute
- Yale University
- Chalmers University of Technology
- Universidade Estadual da Região Tocantina do Maranhão
- Shanghai University of International Business and Economics
- Universidad Complutense de Madrid
- Centro Universitário da Grande Dourados
- Universidade Estadual do Ceará
- Dublin Institute of Technology
- Université Paul Valéry Montpellier 3
- Beijing University of Posts and Telecommunications
- University of Würzburg
- Curtin University
- Université de Neuchâtel
- University of the Balearic Islands
- University at Buffalo
- Universidad de Alicante
- Universidad Nacional del Callao
- Ho Chi Minh City University of Technology
- Friedrich-Alexander University Erlangen-Nürnberg
- Saint Martin's University
- University of Agder
- Alexandru Ioan Cuza University
- Fudan University
- Purdue University Fort Wayne
- Universidad de Murcia
- Westfälische Hochschule
- Memo
- Sveučilište u Rijeci (University of Rijeka)
- Georgia Institute of Technology
- University of Sydney
- Escola Tècnica Superior d’Enginyeria Industrial de Barcelona
- Utrecht University
- University of Oslo
- Universidad del Valle
- University of Cologne
- Emory University
- Carmelcollege Emmen
- Norwegian School of Economics
- University of Sheffield
- Northumbria University
- Huazhong University of Science and Technology
- Dublin City University
- Universidad Autónoma de Ciudad Juárez
- Universidad de Castilla - La Mancha
- Universidad Distrital Francisco José de Caldas
- Tampere University (TUNI)
- Beijing Institute of Technology
- Washington State University
- Technical University of Denmark
- Universitas Indonesia
- Erciyes University
- Middle East Technical University
- Université du Québec à Montréal
- Instituto Federal de Educação, Ciência e Tecnologia do Espírito Santo (IFES)
- Università di Catania
- Universidade Federal de Mato Grosso
- Okinawa Institute of Science and Technology
- George Washington University
- Yachay Tech University
- Manipal Institute of Technology
- University of Glasgow
- Jordan University of Science and Technology
- Aix-Marseille Université
- Taylor's University
- Ahsanullah University of Science and Technology
- Iowa State University
- University of Iowa
- Universität Rostock
- Gwangju Institute of Science and Technology
- University of Keele
- Zhejiang University
- Lanzhou University
- Kookmin University
- Universidade Federal do Paraná
- University of Groningen
- University of Durham
- University of Liverpool
- École de Commerce et École de Culture générale de Martigny
- Latvian
- Abertay University
- ENS Paris Saclay
- Universita degli Studi di Cagliari
- Politehnica University of Timișoara
- Mongolian
- Czech University of Life Sciences
- National Institute of Technology Rourkela
- University of L'Aquila
- University of Delaware
- HTL Pinkafeld
- University of Economics, Prague
- Aristotle University of Thessaloniki
- Nanjing University of Posts and Telecommunications
- University of Melbourne
- École Centrale de Lyon
- Universidade Federal dos Vales do Jequitinhonha e Mucuri
- National Taiwan University of Science and Technology
- City University of Hong Kong
- École Polytechnique Fédérale de Lausanne
- Charité – Universitätsmedizin Berlin
- Hochschule Furtwangen University
- University of Lincoln
- Northwestern University
- University of Oxford
- Università Politecnica delle Marche
- Vanderbilt University
- Technical University Dublin
- Khulna University
- McGill University
- Brno University of Technology
- Universität Duisburg-Essen
- Instituto Nacional de Telecomunicações (INATEL)
- University of Cuenca
- Universidad de las Fuerzas Armadas ESPE
- Northeastern University
- Universitat Politècnica de València
- University of New Mexico
- Akdeniz University
- Universidad Católica del Norte en Antofagasta
- Universidad Tecnológica de Pereira
- Massachusetts Institute of Technology
- University of Information Technology (Vietnam)
- Universidad de Concepción
- Stellenbosch University
- Universidad Internacional de la Rioja
- University of Bremen
- Shanghai Jiao Tong University
- Hochschule Darmstadt
- TOBB University of Economics & Tchnology
- SINTEF
- Universidad Nacional De San Cristóbal de Huamanga
- Marmara University
- Warsaw University of Technology
- National College of Ireland
- University of Alberta
- Universidad Autónoma de Zacatecas
- Universiti Teknologi MARA (UiTM)
- Norwegian University of Science and Technology
- Poznán University of Economics and Business
- Uniwersytet Pedagogiczny
- Manchester Metropolitan University
- ENET'Com
- Pontifical Catholic University of São Paulo
- Sheffield Hallam University
- Universidad Nacional del Altiplano
- Universidade Federal de São Paulo
- Universidad Central de Venezuela
- Instituto Plurilingüe Rosalia de Castro
- University of Málaga
- University of Surrey
- Escola Superior de Tecnologia e Gestão
- Kyoto University
- Skolkovo Institute of Science and Technology
- Cyprus University of Technology
- Università Roma Tre
- Fatih Sultan Mehmet Foundation University
- Tecnológico de Monterrey
- Xiamen University
- Wuhan University
- University of Turin
- Karlsruhe Institute of Technology
- Chulalongkorn University
- Alpen-Adria University Klagenfurt
- Università degli Studi di Salerno
- Univerza v Mariboru
- Universidade da Coruña
- University of California, Irvine
- Open University of Israel
- Sorbonne Université
- University of Southern Denmark
- Tokyo Metropolitan University
- Instituto Tecnológico de Morelia
- University of West Attica
- Mid Sweden University
- University of Macau
- University of Chinese Academy of Sciences
- University of Stuttgart
- Jagiellonian University
- Centro Federal de Educação Tecnológica de Rio de Janeiro (CEFET-RJ)
- Università degli Studi di Pavia
- Pontificia Universidad Católica del Perú
- Erciyes University
- Eötvös Loránd University
- Universidade Estadual de Londrina
- University of Idaho
- National Taiwan University
- Taras Shevchenko National University of Kyiv
- Edinburgh Napier University
- Universidad Nacional de Ingeniería
- Nankai University
- TU Dortmund
- Colorado School of Mine
- Poznan University of Technology
- Università della Calabria
- Hakim Sabzevari University
- Stony Brook University
- Università di Padova
- Georgia Southern University
- Politehnica University of Bucharest
- Universidade Federal de Pelotas
- Mälardalen University
- Indian Institute of Management Indore
- Universidad Internacional de Valencia
- Hamad Bin Khalifa University
- Universidade Federal do Amazonas
- Institut de physique du globe de Paris
- Qatar University
- Universidade Federal do Maranhão
- Albert-Ludwigs-Universität Freiburg
- Universidad de Buenos Aires
- Yıldız Teknik Üniversitesi
- Oslo Metropolitan University
- Renmin University of China
- Dalian Maritime University
- Coventry University
- Universidad Nacional Pedro Ruiz Gallo
- University of Limerick
- Tallinn University of Technology
- Soochow University
- National Sun Yat-sen University
- Hong Kong University
- Ain Shams University
- Universidad Central del Ecuador
- University of Lancaster
- Karlstad University
- Univerzita Hradec Králové
- Hochschule Heilbronn
- University of Zurich
- Basque
- Brunel University
- LUT University
- Universidad Politécnica de Madrid
- University of Szeged
- University of Patras
- University of Tsukuba
- APJ Abdul Kalam Technological University
- Project Plan
- Universiti Teknikal Malaysia Melaka
- University of Warsaw
- International Hellenic University
- Saarland University
- Instituto Politécnico Nacional
- IST Austria
- Chinese Southern University
- King's College London
- HSLU
- IIT Delhi
- University of Tartu
- Pontificia Universida Javeriana
- Federal University of São João del-Rei
- Brussels Faculty of Engineering
- Ahsanullah University of Science and Technology
- Tulane University
- IISER Thiruvananthapuram
- University of Liechtenstein
- Virginia Tech
- University of Dayton
- ENS Lyon
- University of Windsor
- King Abdullah University of Science and Technology
- University of Thessaly
- Brigham Young University
- Isra University
- Università di Foggia
- University of Münster
- Indiana University
- University of Puerto Rico
- Howard University
- Monash University
- University of Massachusetts Amherst
- UC3M
- Universidad Carlos III de Madrid
- Université de Lille
- University of Toronto
- University of Chicago
- Chinese University of Hong Kong
- Universidad Técnica Particular de Loja
- Universidad de La Laguna
- IIT Patna
- Université Paris-Saclay
- Hanoi University of Science and Technology
- Sofia University
- Brandeis University
- COMSATS University Islamabad
- University of Washington
- Universidade Federal do Espírito Santo
- Programa de Pós-Graduação em Engenharia Elétrica
- Somaiya Vidyavihar University
- Bulgarian
- Telkom Universuty
- Instituto Federal do Pará
- South China Normal University
- Malmö University
- ITMO University
- Beijing Forestry University
- UNIVERSIDADE ESTADUAL VALE DO ACARAÚ
- Seoul National University
- Williams College
- University of Fribourg
- Universidade Federal do Recôncavo da Bahia
- Jinan University
- Université Paris Nanterre
- Instituto Federal do Rio de Janeiro
- Sergio Arboleda University
- Normandie Université
- National Tsing Hua University
- University of Engineering & Technology Lahore
- Nitte Meenakshi Institute of Technology
- University of Cantabria
- Vrije Universiteit Amsterdam
- Yonsei University
- Jiangxi Normal University
- University of Kentucky
- Universidad ECCI
- Universidad Nacional de Moquegua
- National Cheng Kung University
- University of British Columbia
- University of Durham
- Hong Kong Polytechnic University
- Anna University
- DuyTan University
- OSU Official
- Université de Mons
- Erasmus School of Economics
- Hong Kong University of Science and Technology
- University of Djelfa
- Université Paris Cité
- La Trobe University
- Southern Methodist University
- Université libre de Bruxelles (ULB)
- Galician
- Journal articles
- Bibliographies
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.