LaTeX templates and examples — Algorithm
Seneste
Easy PSET template with examples.
Maximization of muffler performance is important, but there is always space volume constraints. Shape optimization of multi-segments Muffler coupled with the GA searching technique. Outline: Problem Statement Derivation of Four Pole Matrices and an expression for STL Introduction to GA and it's Implementation A numerical case of noise elimination on pure tone Results and Discussion

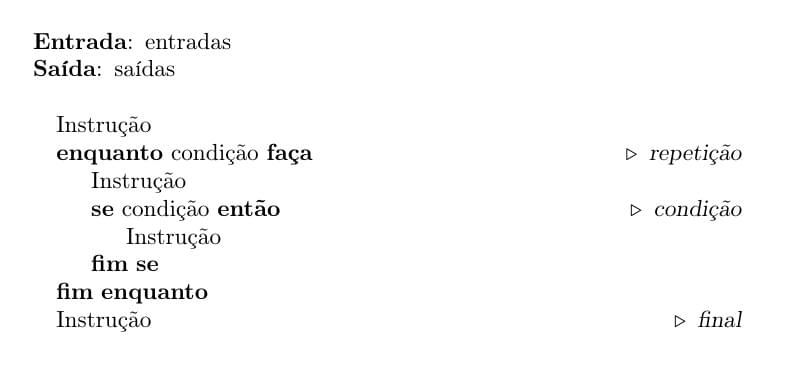
An example showing how to use pseudocode in Algorithmcx.

An example using the predefined algpseudocode command set from the algorithmicx package, for typesetting pseudocode or algorithms.
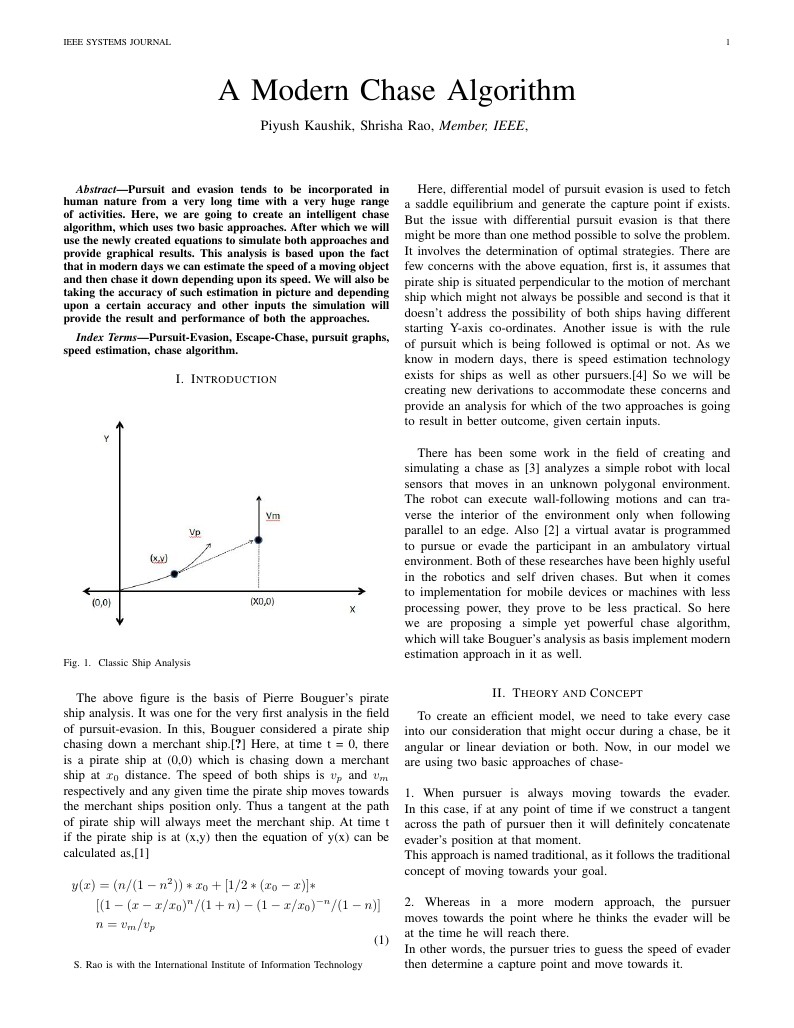
Pursuit and evasion tends to be incorporated in human nature from a very long time with a very huge range of activities. Here, we are going to create an intelligent chase algorithm, which uses two basic approaches. After which we will use the newly created equations to simulate both approaches and provide graphical results. This analysis is based upon the fact that in modern days we can estimate the speed of a moving object and then chase it down depending upon its speed. We will also be taking the accuracy of such estimation in picture and depending upon a certain accuracy and other inputs the simulation will provide the result and performance of both the approaches.
Algorithm Template for COMP 182
Modelo para geração de algoritmos UFSCar/DC/CAP

Euclid's algorithm written out using the algorithmic environment in LaTeX.
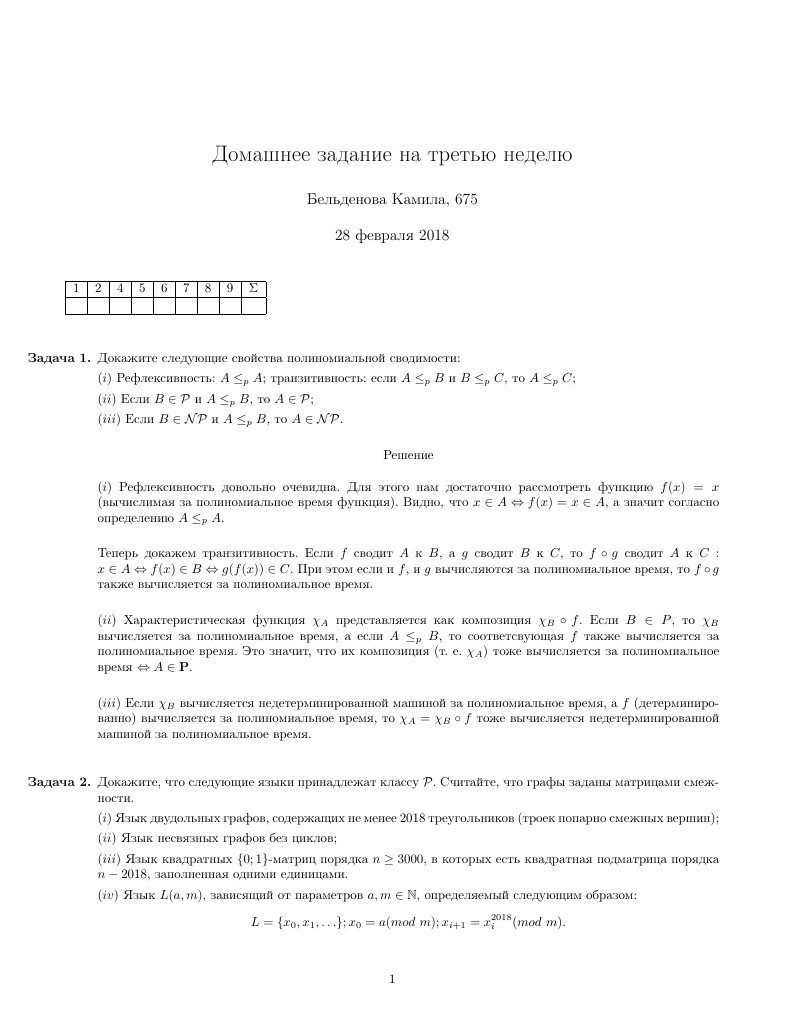
#algorithm #russian #homework
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.