overleaf skabelonsgalleriCommunity articles — Recent
Artikler, præsentationer, rapporter m.fl, skrevet i LaTeX og udgivet af vores fællesskab.
Alok Shankar's CV
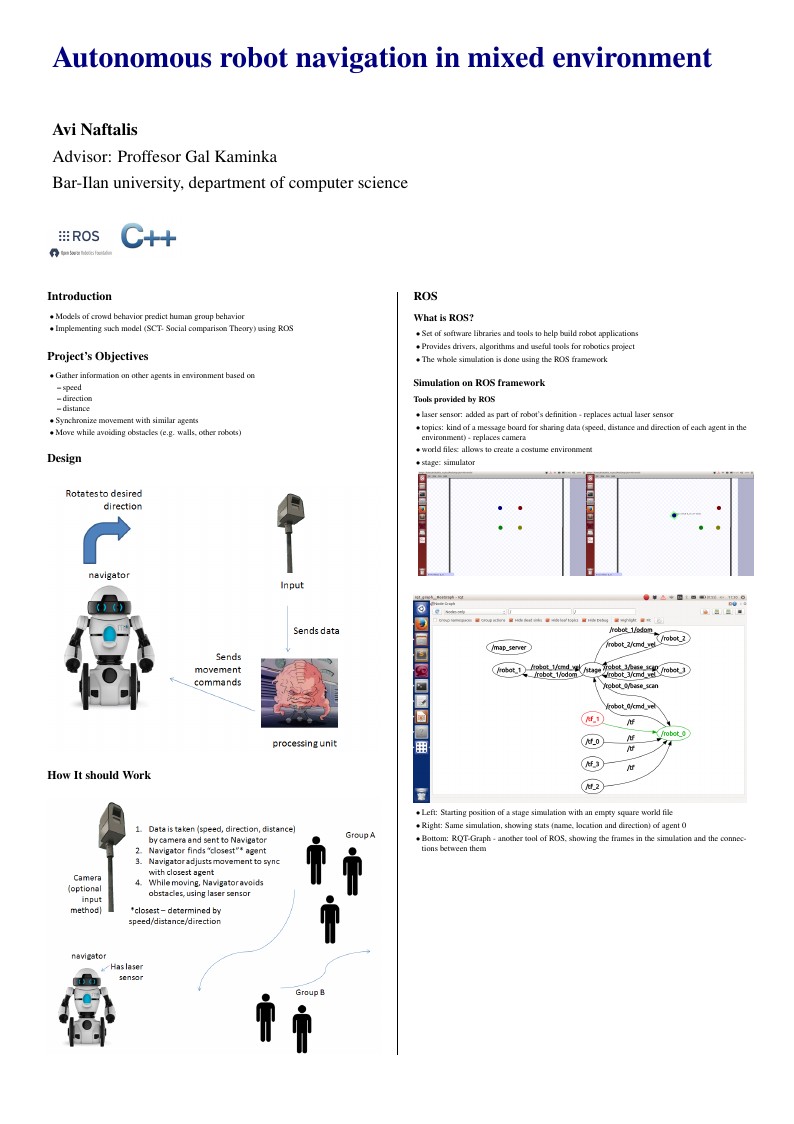
Created from portrait poster template
MATH 108 - Introduction to Formal Mathematics

Fast exponentiation
A short book on LaTeX
Lab exercise on LaTeX basic formatting commands.

Mathematical Induction paper

Latex assignment of the definition of a derivative

In the paper, the authors try to combine the database system field and computer architecture. This tries is from his awareness of current database research problems (trends). The author argues that the current trends of database system have focused on theoretical and algorithmic problems. So, they need to consider the other part of database system, such as computer architecture. They thought that this is the time to think about architectural aspect of database system.
\begin
Discover why over 25 million people worldwide trust Overleaf with their work.